Subtotal $0.00


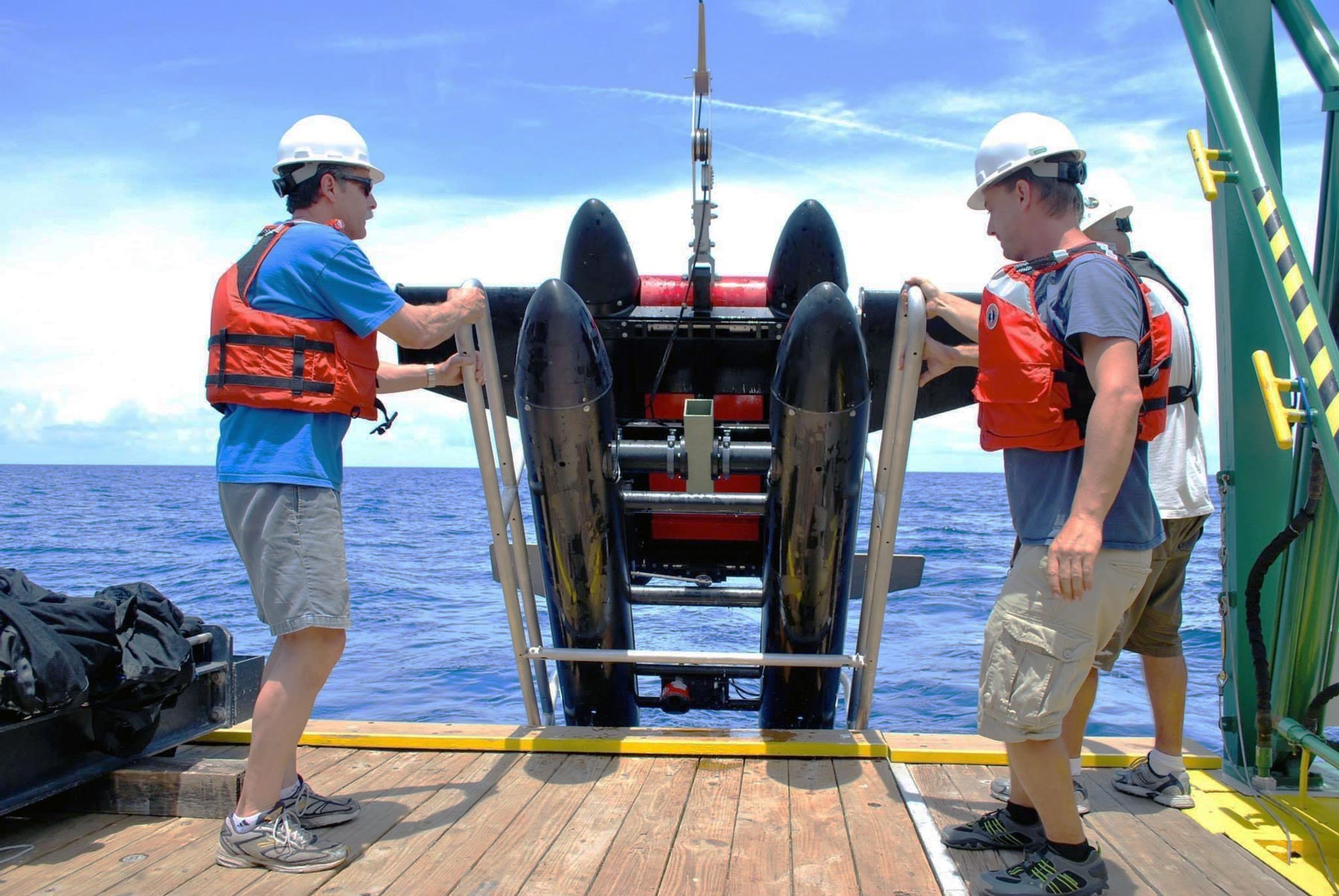
Bellamare designs and delivers semi-custom towed vehicles that occupy a powerful middle ground between ROVs and AUVs. Like ROVs, our platforms support continuous 24/7 operations, real-time data streaming, and high-bandwidth sensor payloads with immediate operator feedback. Like AUVs, they efficiently cover large areas along long transects. The result is a highly efficient survey tool that combines broad spatial coverage, live data access, and operational endurance. Scalable in size and adaptable over time, Bellamare’s towed vehicles support evolving scientific needs, from compact sensor packages to demanding, data-intensive missions in coastal or open-ocean environments.
Telemetry systems are designed around your sensors and data rates, supporting high-bandwidth streaming as well as hybrid and logging-based architectures when fiber-optic tethers are not available.
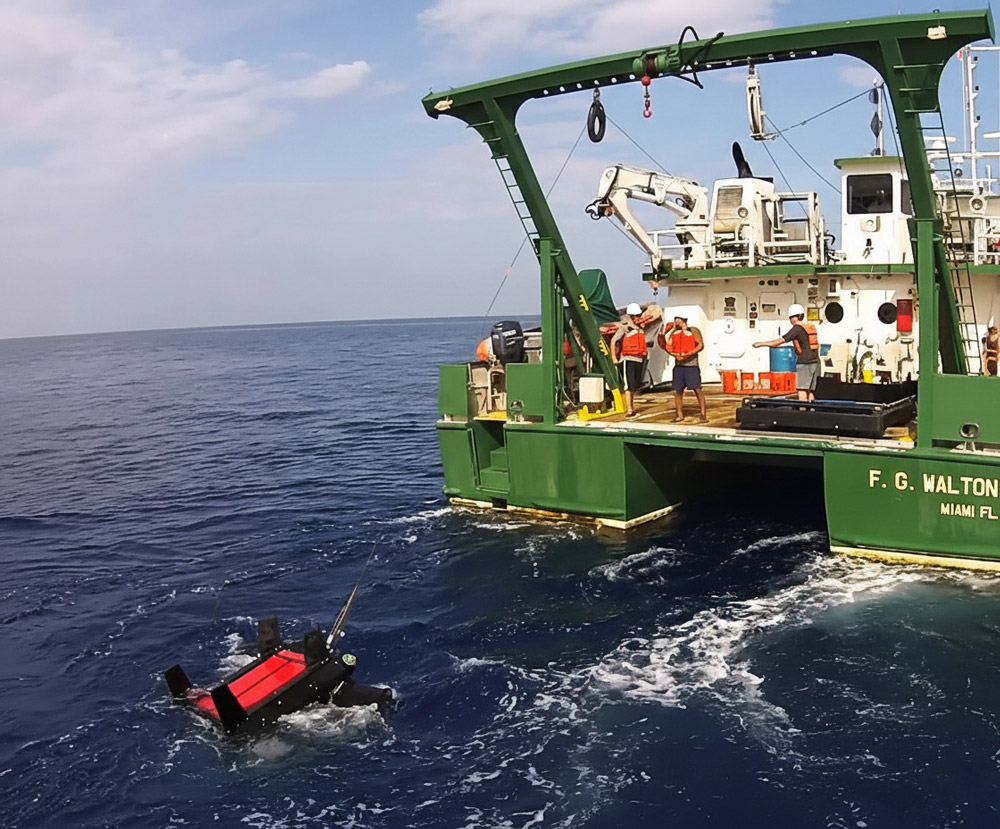
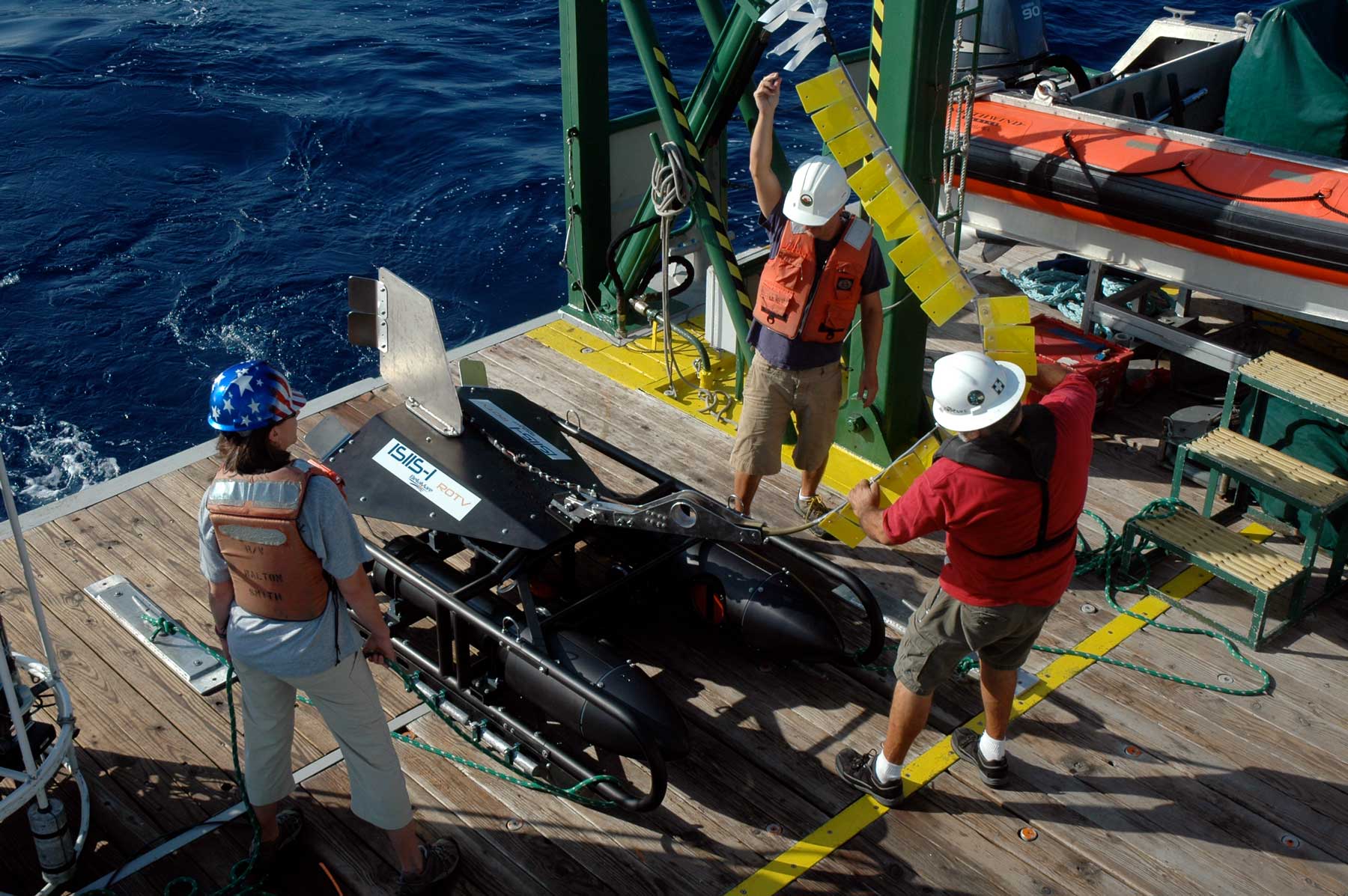
Control surfaces and actuators provide precise depth, roll, and lateral control, enabling repeatable profiles and stable imaging performance. Near the surface, lateral maneuvering allows the vehicle to operate clear of the ship’s wake for improved data quality.

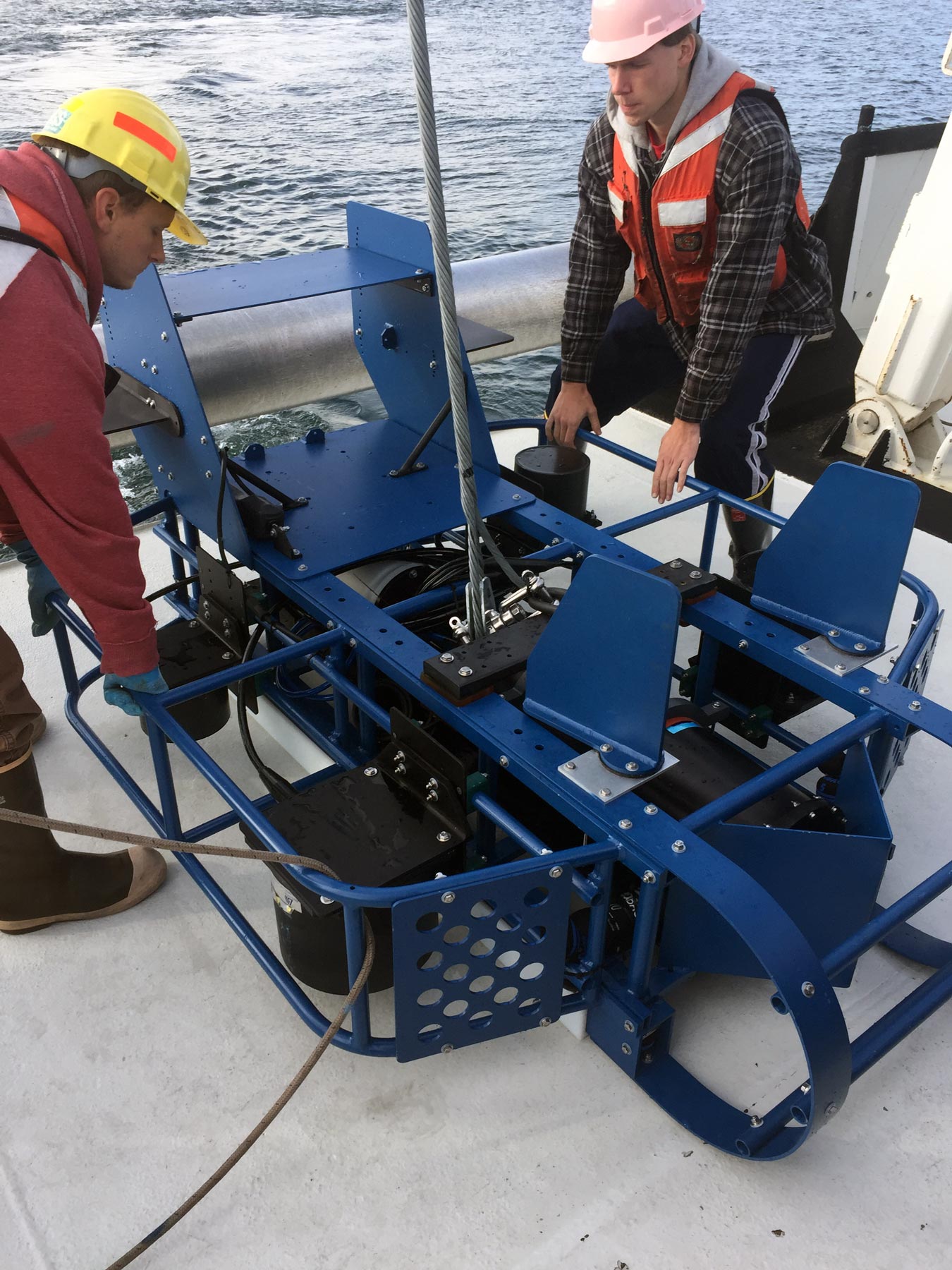
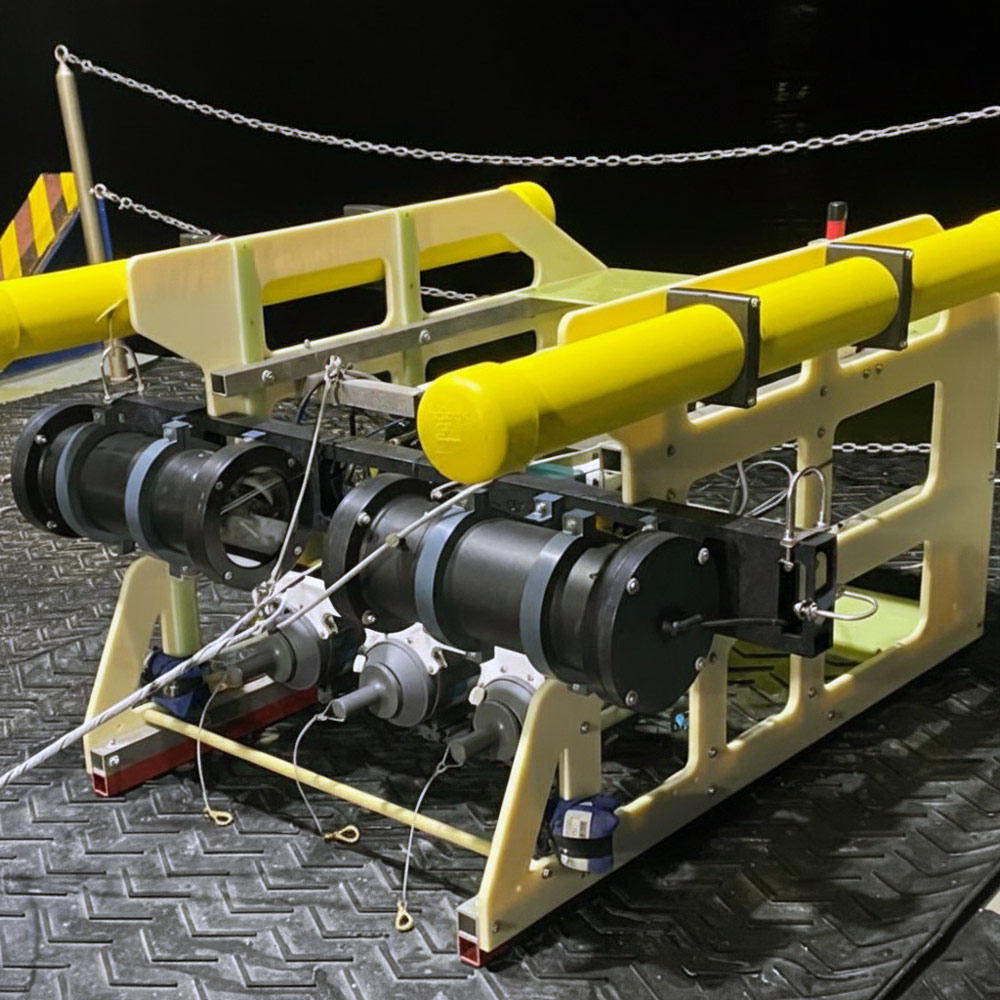
Open-frame designs and modular power and telemetry architectures allow our sleds to adapt to changing instrumentation needs, supporting sensor upgrades and new mission profiles over time.
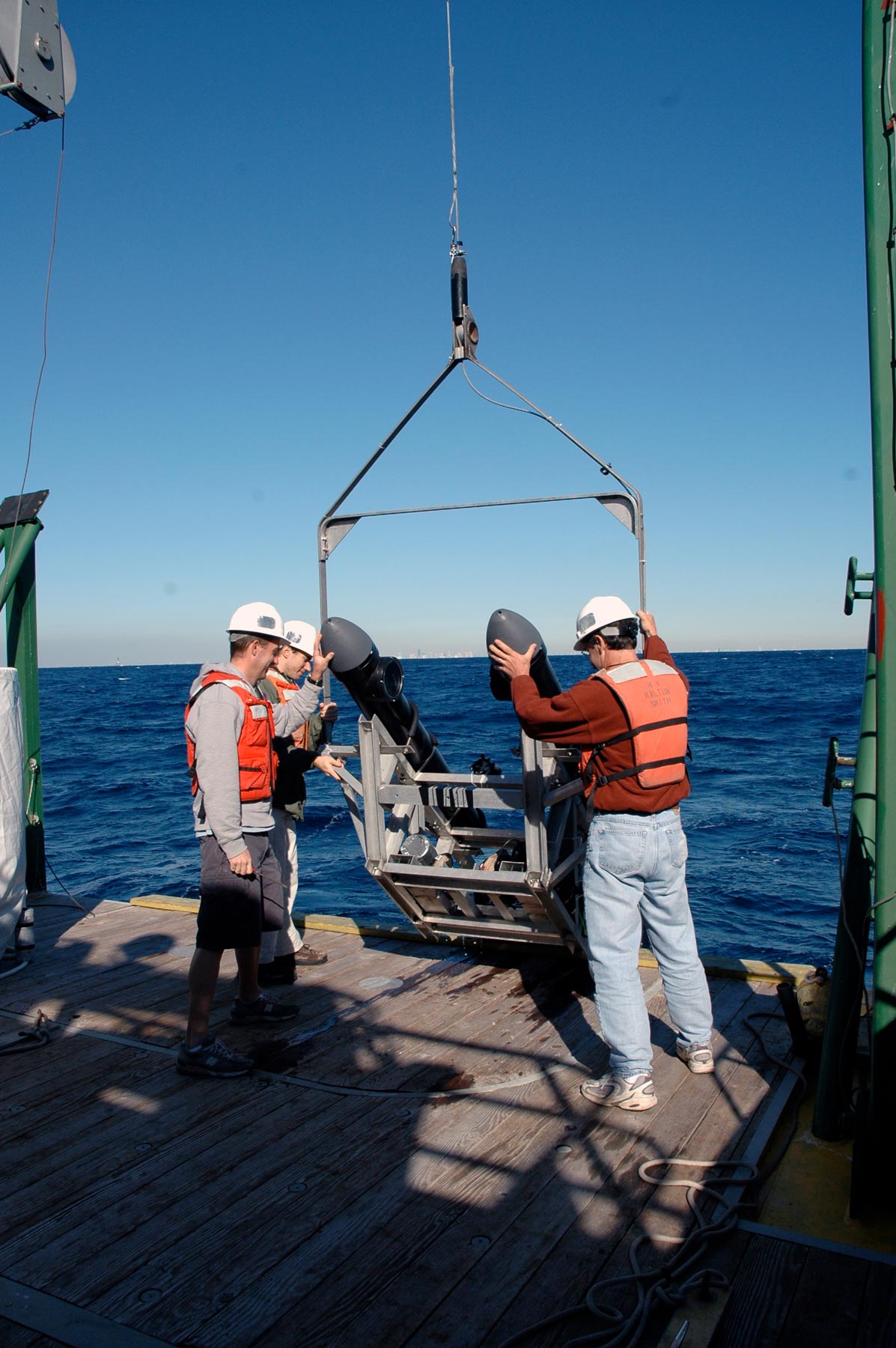
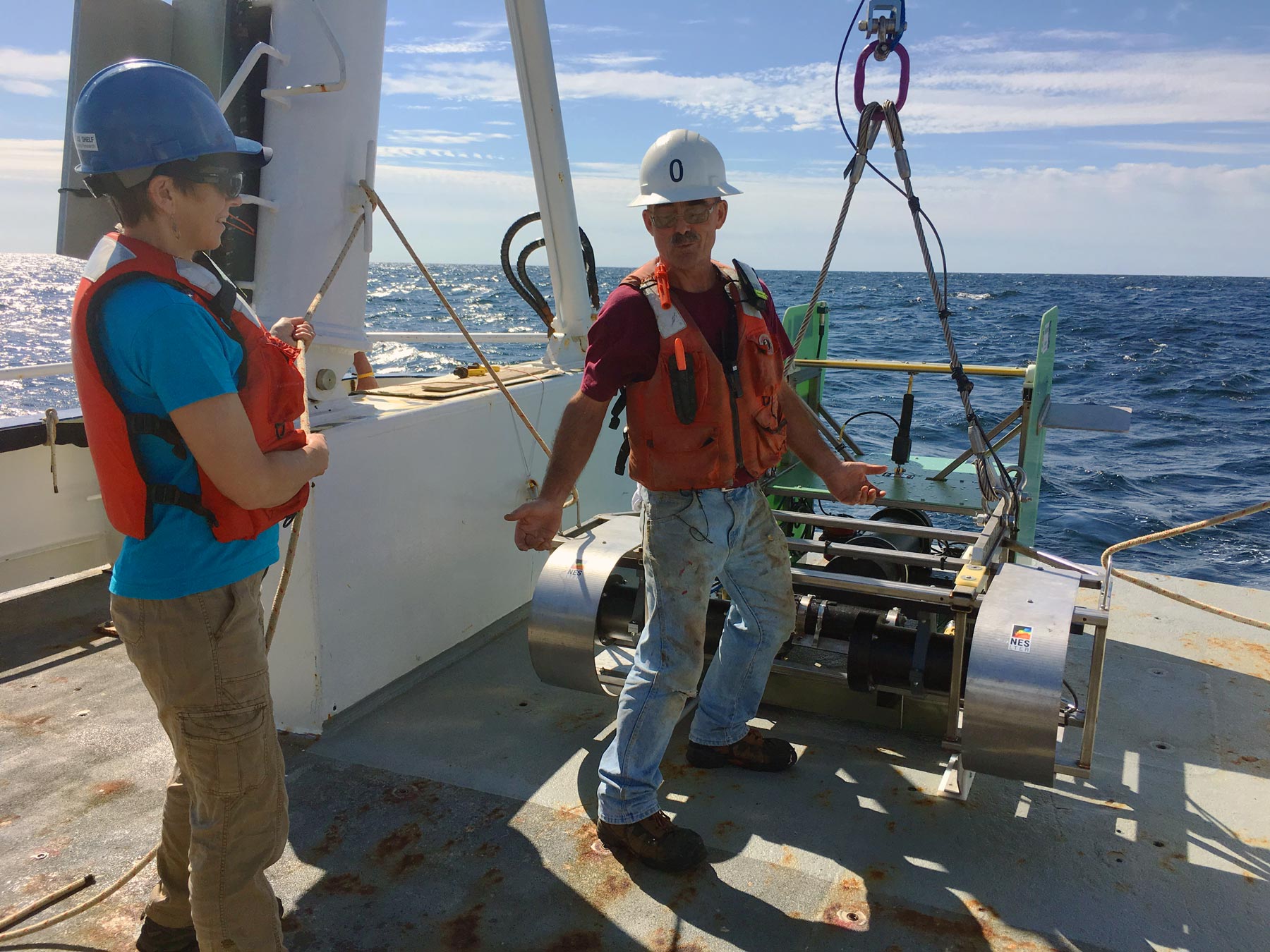
Our towed vehicles routinely operate at tow speeds up to ~5 knots and can be engineered for depths down to 1,000 m. Designs balance hydrodynamic stability, structural robustness, and sensor protection for reliable performance across a wide operating envelope.

We deliver complete, ready-to-deploy systems—including vehicle, tether, winch, and topside control station. Each system is supplied with power distribution, operator interface, and JADE software for configuration, monitoring, and data management, minimizing integration effort for science teams.